

In recent years, northern Thailand has faced an alarming rise in forest fires, driven by slash-and-burn agriculture, prolonged dry seasons, and climate change. Chiang Mai was recently ranked as the world’s most polluted city for seven days straight, with an average of 1.7 million people being affected by poor air quality and smoke between February and May every year. It is estimated that Northern Thailand lost 19,000 hectares of forest to wildfires in 2020 alone (Source: WWF).
In response to this persistent problem of forest fires and poor air quality, our team initiated the FireFly project — a one-year pilot funded by the APNIC Foundation under the ISIF Asia program — to explore community-driven, low-cost early warning systems for wildfire detection.
The project is a joint effort between University of Glasgow Singapore (UGS) and Chiang Mai University (CMU), was developed in close collaboration with the Forest Restoration Research Unit (FORRU) at Chiang Mai University, and received technical support from Royal Melbourne Institute of Technology Viet Nam (RMIT VN). It focuses on building a modular sensing network, making use of the Internet of Things (IoT) concept and aerial reconnaissance using unmanned aerial vehicles (UAVs) for connectivity. Our goal was to develop low-cost tools that empower local communities with the ability to detect and respond to fire hazards before they escalate.
From concept to deployment
Detecting forest fires in remote forests in the hilly regions of Northern Thailand poses significant challenges in terms of accessibility and connectivity. Most forest fires are detected once they are sufficiently large enough to be physically visible. This makes it difficult to contain the fire before it has spread to large tracts of the forest. Additionally, remote regions typically have limited 4G coverage, and satellite communication is not practical because a low-orbit satellite uses a licensed frequency band, which might not be available.
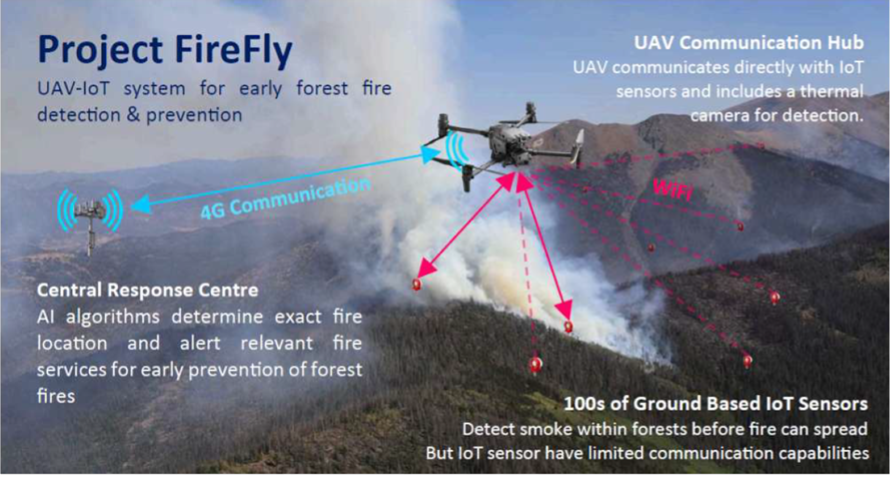
As a way of overcoming those challenges, we proposed combining UAV technology with IoT devices to develop an early detection system for forest fires in remote areas. Our primary aim in the project was to ensure that we were able to deploy low-cost, off-the-shelf technology that could be easily replicated to scale up the project while collecting data on smoke, temperature, and humidity. The overall concept addresses a major limitation of IoT technology — communication barriers in rural terrain (overall concept shown in Figure 1).
Under-canopy detection

The ground-based IoT sensors (Ground Modules) can detect smoke, humidity, and temperature under the tree canopy and make a great option for early fire detection. Because 4G coverage is often limited in these areas, the Ground Modules themselves are not directly connected to the cloud, saving cost and energy. The Ground Module includes a low-cost ESP32-based IoT device with an integrated Wi-Fi module to communicate with the Air Module attached to the UAV. The ESP32 is a readily available and cost-effective chip with an average price of about USD 7. The Ground Modules require regular battery charges to enable deployment for weeks in forest environments.
Aerial communication hub and data relay
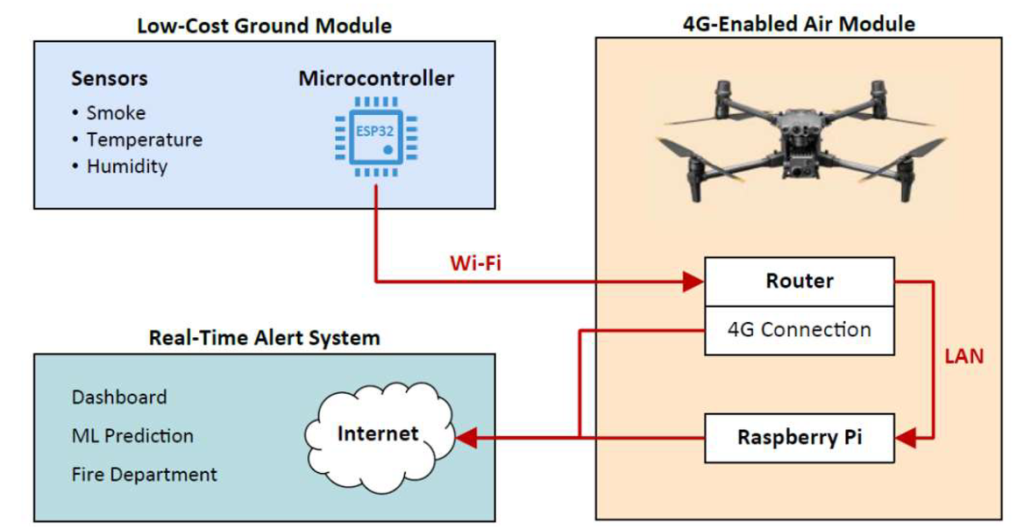
The UAVs act as communication hubs to collect data from the Ground Modules transmitted over Wi-Fi, while also surveying the area for smoke and fire. The UAV is fitted with an Air Module, which includes a 4G-enabled Wi-Fi router and a Raspberry Pi for onboard computing and data logging. This allows the UAV to act as a relay system: As it follows a preprogrammed path, it collects data from Ground Modules in range, and streams data to the cloud in real-time whenever 4G coverage is available (overall concepts shown in Figures 1 and 3).
In the absence of 4G coverage, team members can download all the data from the UAV and upload it onto the cloud at a later stage. This data usually ranges between a few KB to a couple of MBs and is easily transmittable from the Ground Modules to the UAV.
Real-world validation
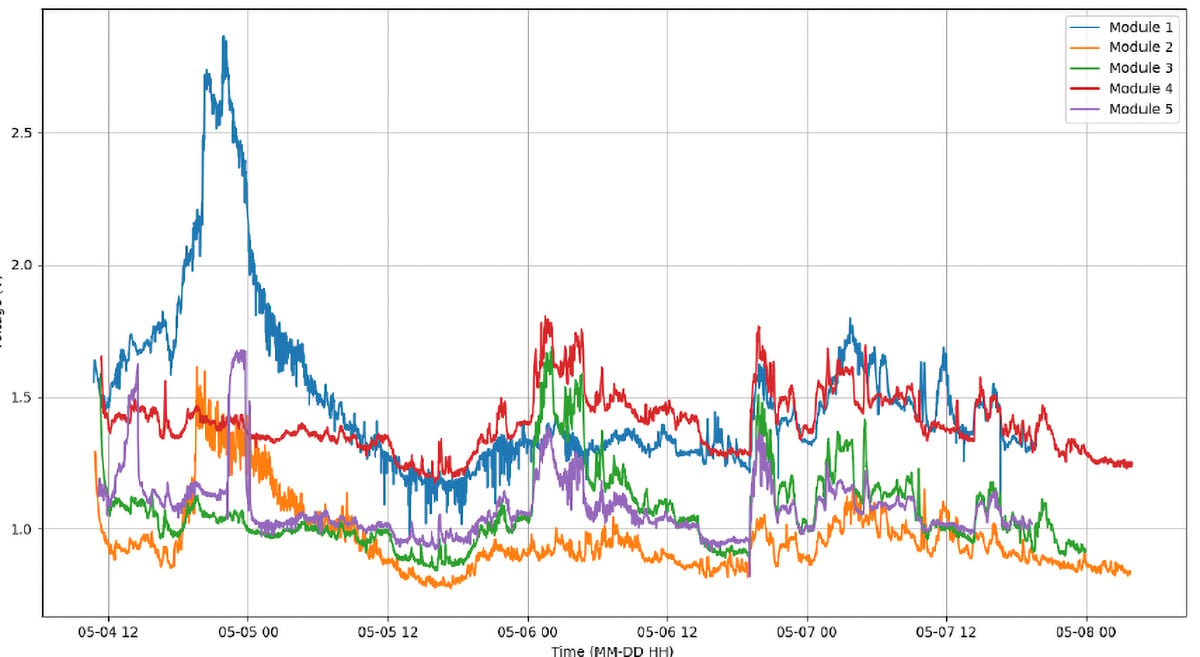
In March 2024, during peak fire season, one of our Ground Modules picked up an actual fire event. A sharp spike in PM2.5 was observed, accompanied by rising temperature readings (Figure 4). This was quickly validated using drone footage and confirmed with field checks by the FORRU team (Figure 5).

This incident validated the system’s fire detection and monitoring capabilities and showed that low-cost community systems can be integrated into broader forest protection strategies.
Technical insights
The FireFly pilot project provided technical insights that will be useful when scaling the system up in the future, and which may also be valuable to other projects combining UAVs and IoT sensors.
- Using the Wi-Fi on the ESP32 microcontroller worked well as the primary method of communication between the Ground Modules and the Air Module on the UAVs.
- Ground Module power stability remained a challenge as sensors would go offline regularly, which impacted data collection. The smoke sensor in particular consumed a lot of power.
- Sensors arrived uncalibrated to local conditions, so calibration was essential for PM2.5 accuracy.
- Antenna placement and housing affected data reliability and will be discussed in detail in future articles about the project.
- Off-the-shelf drones had limited battery life, guiding future hardware planning to include additional batteries and optimized UAV flight routes.
These insights will be addressed when designing future iterations of the FireFly project.
Collaboration and training
A key project strength was its participatory approach. Workshops and training sessions were conducted with FORRU and local stakeholders, focusing on:
- Optimal site selection for the pilot project.
- Understanding local protocols for fire prevention.
- Installing and maintaining sensor nodes.
- Interpreting dashboard data.
- Safe operation and deployment of UAVs.
This ensured that the system was not only technically functional but also usable by those on the ground.
Looking ahead
The next phase — FireFly 2.0 — will expand on these results. Plans include:
- Wider distance sensor coverage.
- Enhanced sensor functionality for biodiversity conservation, including camera traps, soil sensors and acoustic sensors.
- Improved network connectivity protocols (LoRA) to enable communication between the Ground Modules themselves and the Air Module.
- Enhanced Machine Learning (ML) algorithms for forest fire prediction.
- Improved anomaly detection, for instance, of animals and birds triggering the camera trap, using AI.
- Integration with local and regional alert systems.
By combining ground-based sensors and aerial data relay, we aim to create more adaptive, real-time fire monitoring networks for South East Asia to not only conserve forests and biodiversity but also to safeguard the health of some of the most vulnerable communities in the region.
Learn more about this project in the technical report at APNIC Foundation.
Acknowledgements
The FireFly project was a collaboration between Dr Henrik Hesse (UGS), Dr Kampol Woradit (CMU), and Dr Dinesh Bhatia (RMIT VN), and the team at FORRU, with support from the APNIC Foundation through ISIF Asia.
Dr Dinesh Bhatia is a Senior Lecturer, Aviation at RMIT Viet Nam with interests in aerodynamics, renewable energy, and sustainable technologies, reflecting his commitment to interdisciplinary collaboration.
The views expressed by the authors of this blog are their own and do not necessarily reflect the views of APNIC. Please note a Code of Conduct applies to this blog.